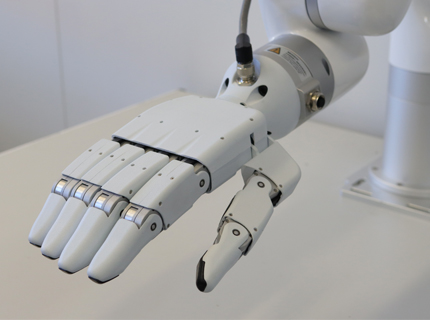
HandEffector Human Inspired Robot Gripper
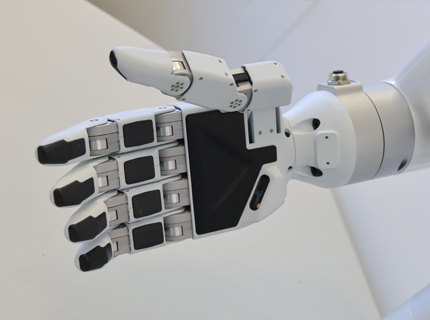
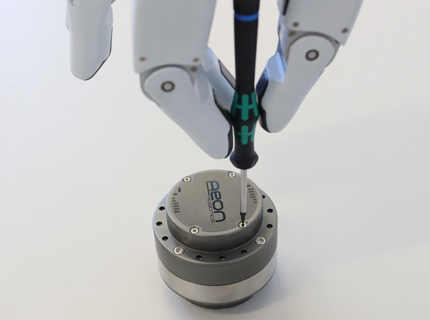
The HandEffector is a robotic gripper modeled after the human hand and forms the core component of the DROID robot system. It uses integrated sensors and AI processing to learn gripping motions and forces. A Quasi-Direct-Drive (QDD) technology with field-oriented motor control enables torque sensing inside each joint to create a depth-sensitive sense of force. This enables training and grasping of even sensitive objects, such as food, glass or soft packaging materials. The integrated camera and AI processing enables grasp adaption, quality assurance and process monitoring during pick and place operations. The ISO 9409-1 compliant mounting adapter enables easy integration to upgrade existing industrial robots to an intelligent robot solution.
- High Torque Brushless Motors
- High Precision Reduction System
- Magnetic Encoders
- Integrated Electronics
- RS485 Communication Bus
- Torque sensing in each joint
- Excellent repeatability
- Lightweight and Durable
Available on request. Please contact us for more information
Product Images

Specifications
| Drive Elements | 11x/14x ADX30 Actuator with QDD Technology |
| Degrees of Freedom | 11-19DoF 2 active + 1 passive per finger (optional) 3 thumb joints 3+1 finger abduction (optional) |
| Fingertip Force | Peak 30N Intermittent 20N Continuous 15N |
| Onboard CPU | ARM Processor + AI Accelerator |
| Sensors | Joint positions, joint velocities, torque sensing 5MP RGB autofocus camera ToF Depth sensor |
| Connection | RS485 bus system, USB |
| Operating Voltage | 24V |