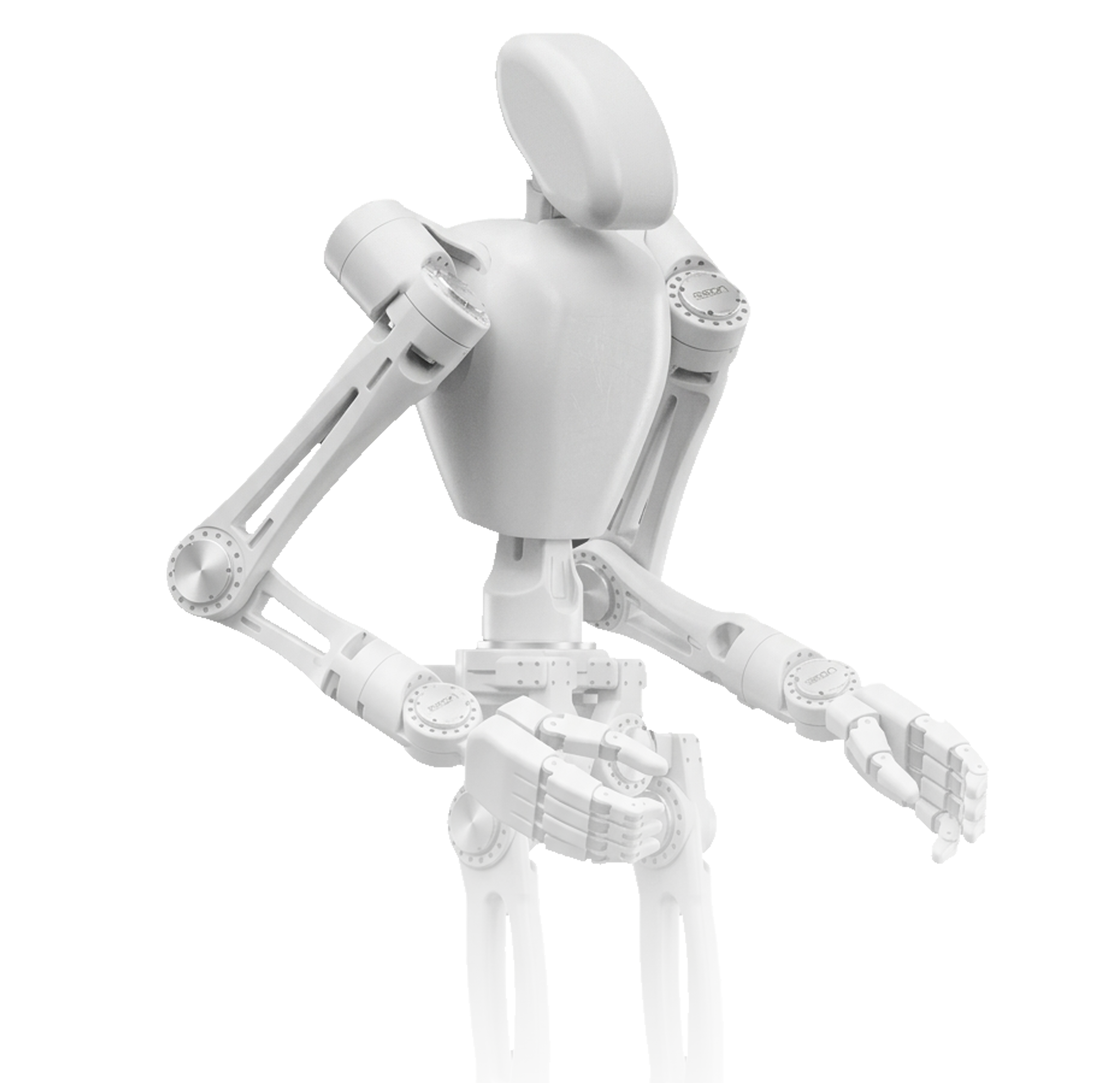
Designed after the human model
The 5-finger gripper and robotic arm combination is designed after the human model to enable operation in environments designed for humans. This allows to automate processes and applications that previously could not be automated.
Intuitive Motion Teaching
A wearable force feedback controller allows intuitive teaching of the robot hand by demonstrating the grasping motions and forces without the need for programming skills.

AI driven programming and object recognition
AI-assisted force control allows the adaptation of grasping motions to new objects and the creation of object databases with target forces and positions by combining force and motion primitives with image data.
Awards:
